Welcome!
Student Fast Robots Course Webpage

Ethan Sarpong
Mechanical Engineer | eos29
Welcome!
Student Fast Robots Course Webpage
About Me
Senior Mechanical Engineering student at Cornell University with a passion for understanding and demystifying complex systems. With expertise in design, structural analysis, simulation, and testing, thrives on exploring the functionality and behavior of systems often regarded as "black boxes." Work reflects a balance of technical rigor and creativity, applying engineering principles to design and optimize innovative solutions.
Hobbies/Interests
Bowling, Reading/Podcasts, Cooking, Barber, Drummer
Lab Assignments
Lab 12: Planning and Execution
In this final lab, my aim was to have the robot navigate through a set of waypoints across the map.
Read More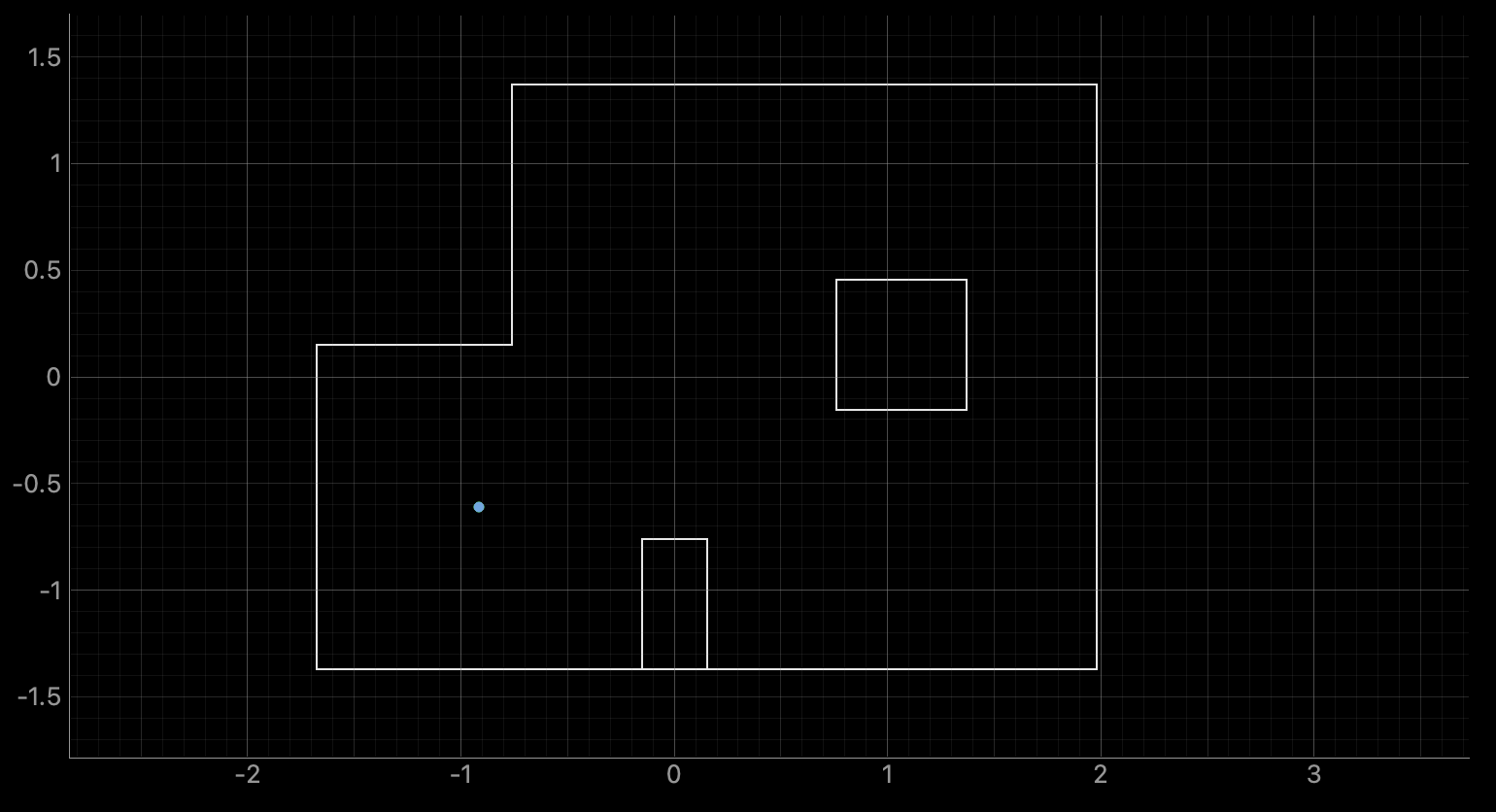
Lab 11: Grid Localization on Real Robot
The purpose of this lab is to implement grid localization using Bayes Filter on the actual robot.
Read More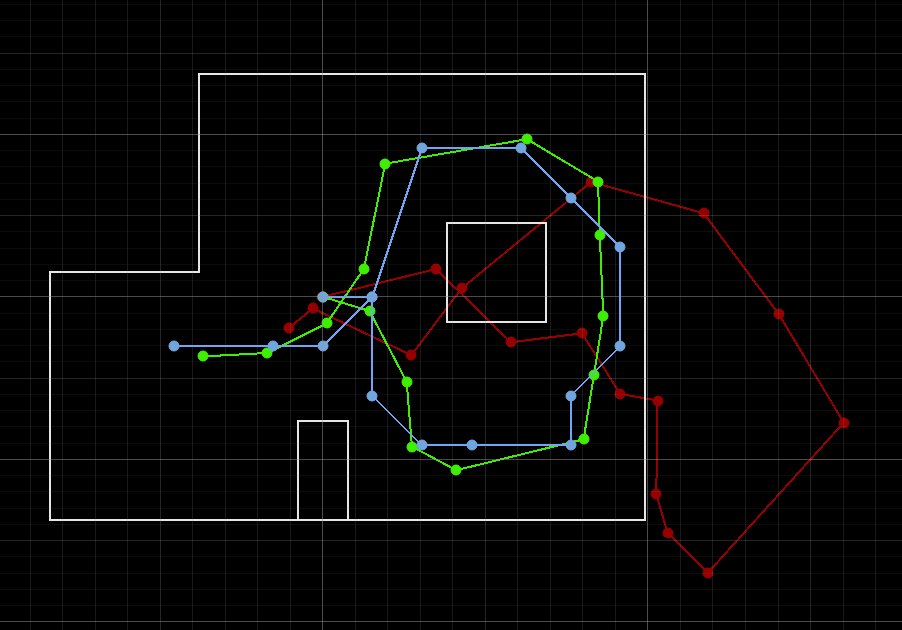
Lab 10: Grid Localization using Bayes Filter
The purpose of this lab is to implement grid localization using Bayes Filter with a simulation.
Read More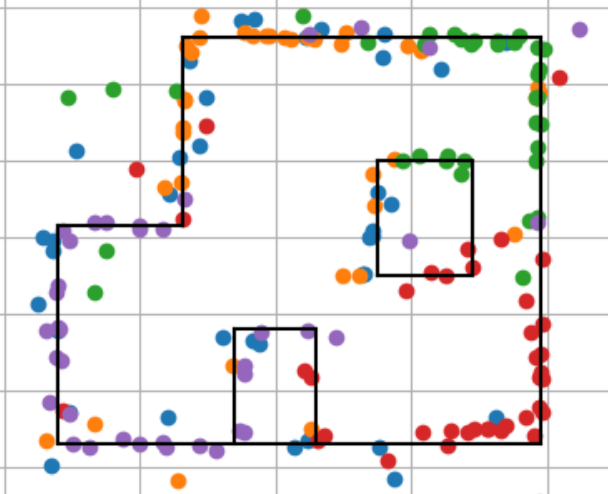
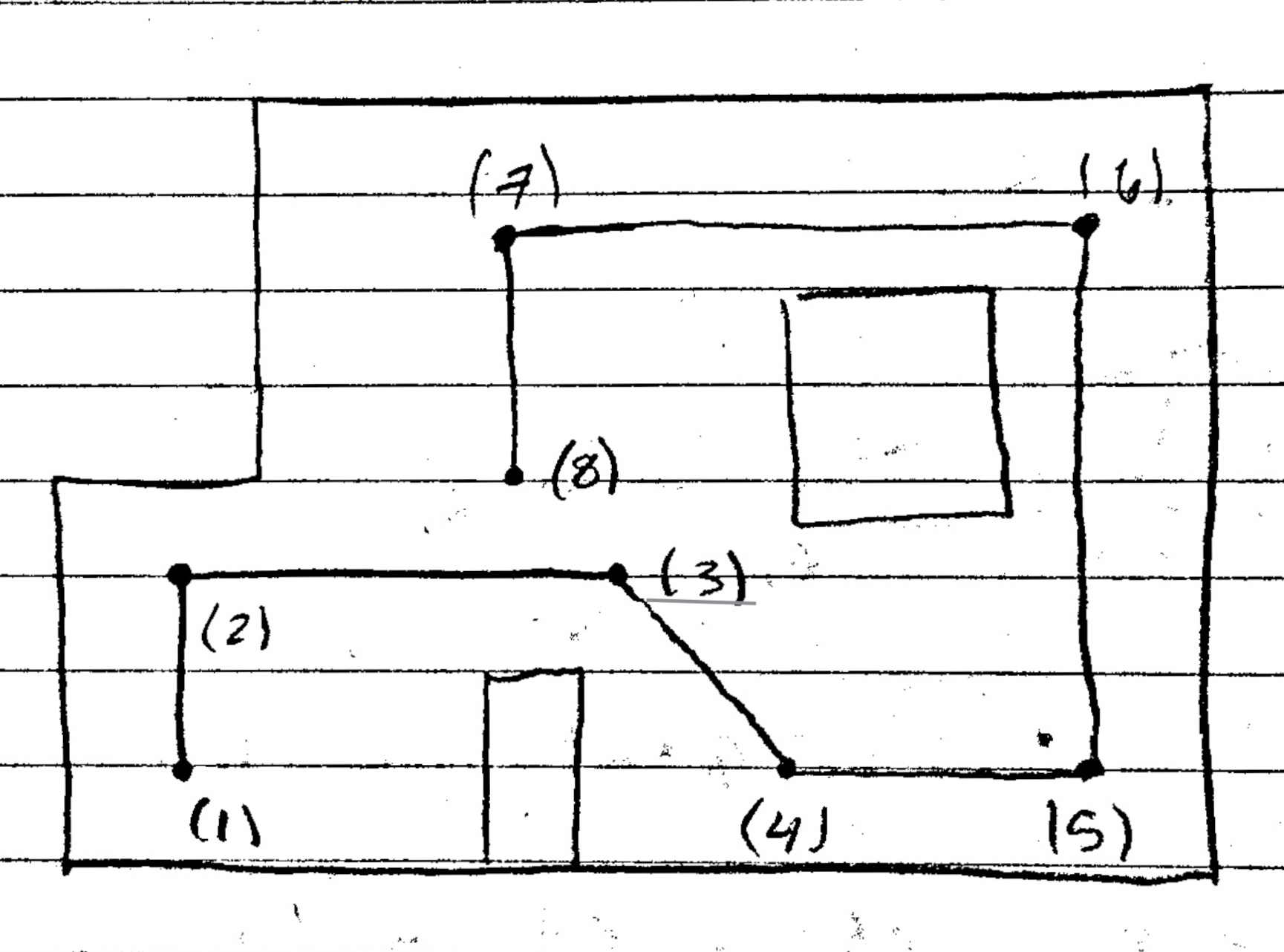
Lab 9: Mapping
In this lab I mapped out a static room, which will later be used for localization and navigation tasks.
Read More
Lab 7: Kalman Filtering
Implemented a Kalman Filter to supplement the slowly sampled ToF values for modeled estimates to increase the speed of our execution
Read More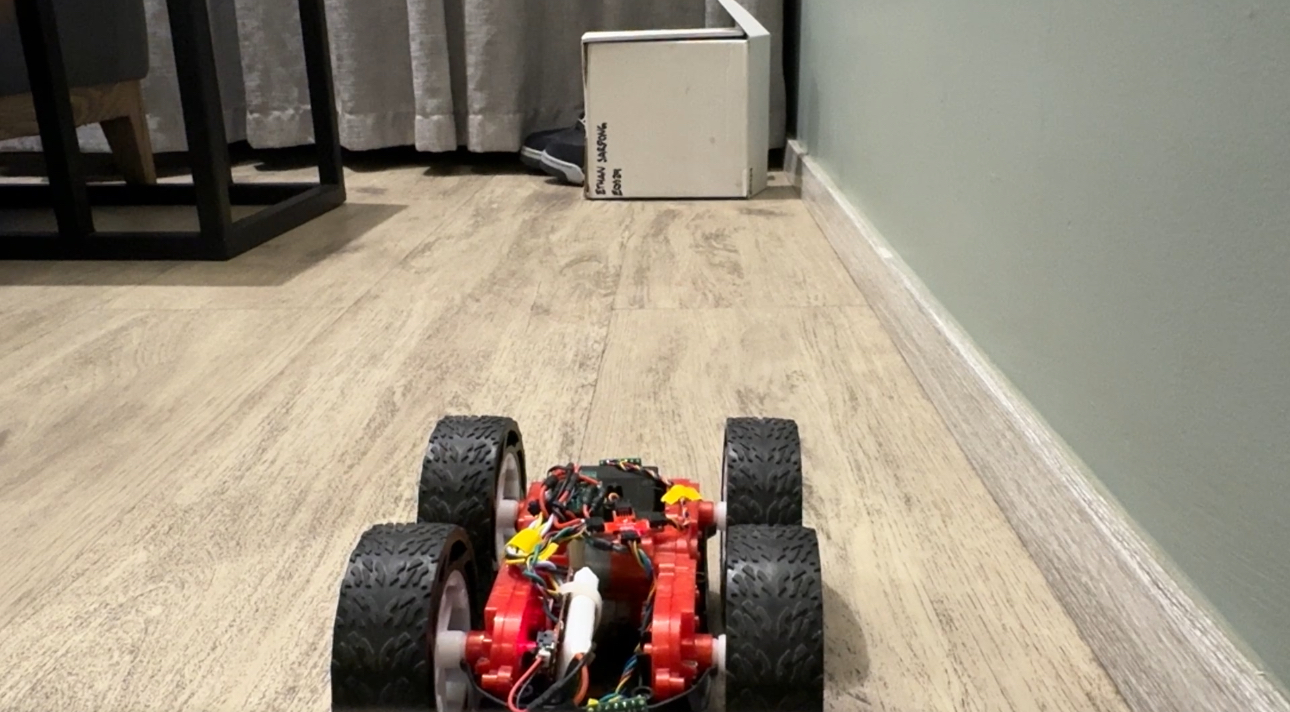
Lab 6: Orientation PID
Continued working with and implementing PID controllers. This controller controls the orientation of the robot using the IMU sensor.
Read More
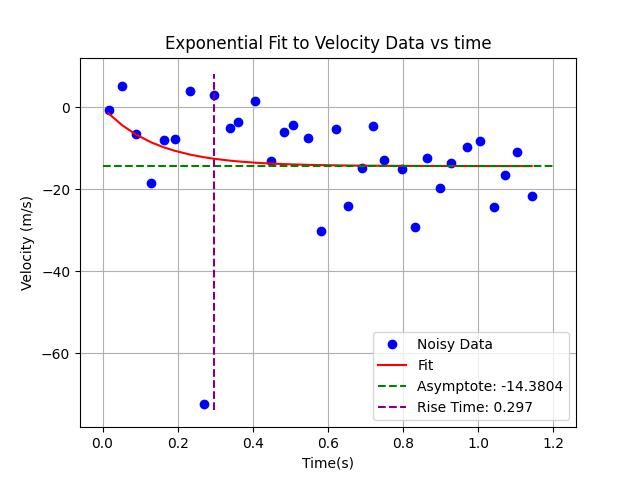
Lab 5: Linear PID control and Linear interpolation
Gained exerience implementing PID controllers. This controller will manipulate the response of the robot as it drives toward a wall, ideally stoping at a target/setpoint.
Read More
Lab 4: Motor Driver and Open Loop Control
Configured the RC Car from manual to open loop control using the Artemis and Motor Drivers to execute a pre-programmed series of commands.
Read More
Lab 3: Time of Flight Sensor
Setup and equiped my Artemis with distance sensors. I configured this setup to support multiple ToF sensors recieving reading as fast as possible.
Read More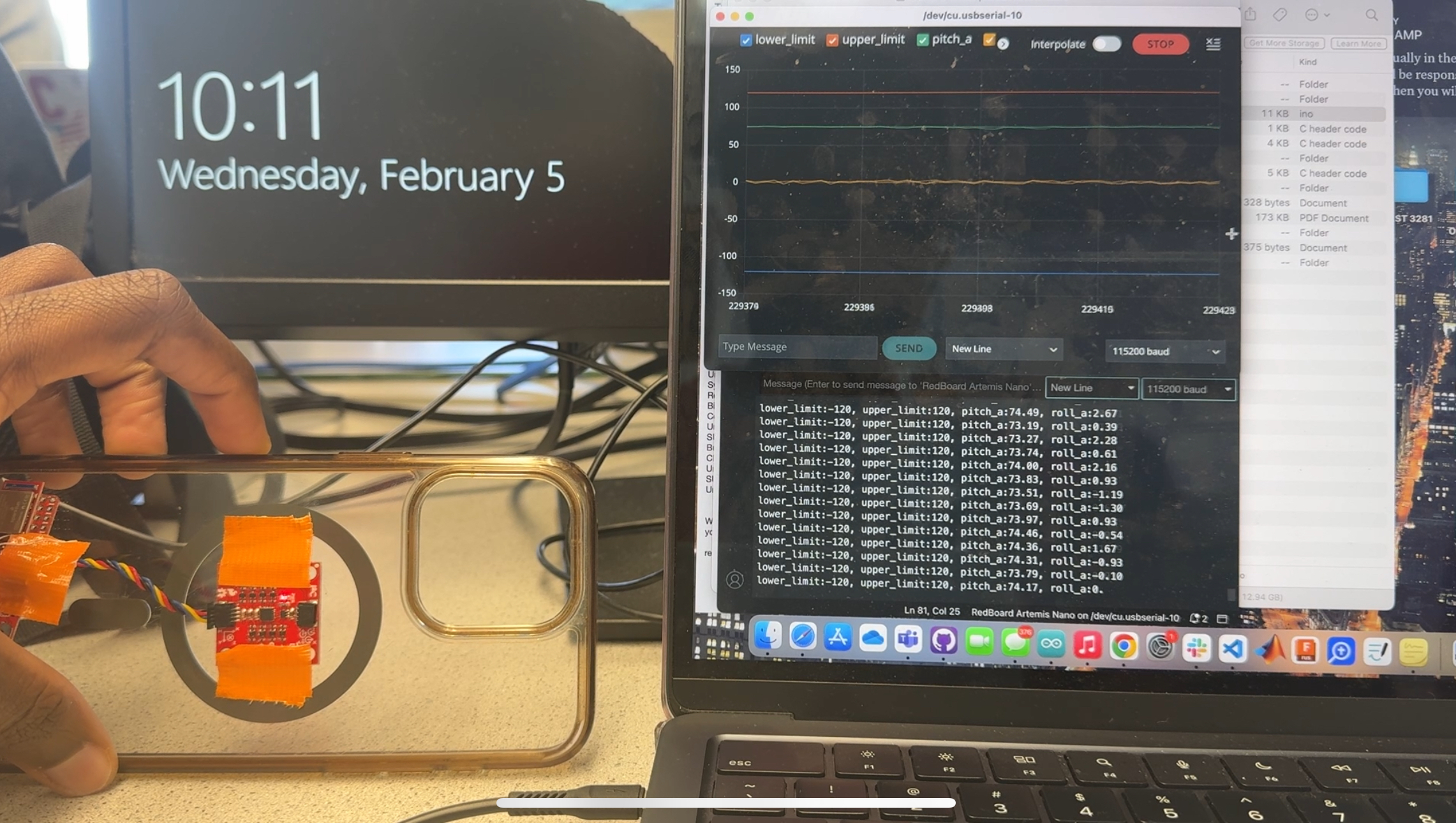
Lab 2: IMU Sensor
Implemented the IMU sensor into my program, which includes Accelermeter and Gyroscope data processing and filtering
Read More
Lab 1: Artemis/Bluetooth
Set up the Artemis Board using Arduino IDE and gaining a familiarity sending and recieving commands via Bluetooth.
Read More